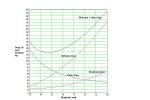
I had arbitrarily stopped the graph at 100 mph, Kai, because the drag of an open airframe gyro becomes prohibitively high.
But of course we can streamline the fuselage and install more power. The ultimate limit of top speed is the rotor itself; that limit being compressibility effects of the advancing rotor blade tips.
Cierva knew most of the answers ~75 years ago. The following is an OCR of a paper written by Cierva in 1934.
High Speed Autogiros
Continuing the policy which this company has followed in its technical development, it appears that now that all the secondary problems of the direct-control system seem to be satisfactorily solved, the time is ripe to take a definite step in one of the directions more promising for the utilization of the peculiar high speed-range qualities of the Autogiro.
If a machine with a top speed of the order of 200 mph could be produced that retains
substantially the slow flying characteristics of our existing machines, there is no question
that such a machine will have tremendous practical possibilities.
There are two problems present in the design of a high speed-range Autogiro. One is the cleaning up of the design so as to reduce the possible drag to a minimum figure which should be comparable to that of an equivalent high-speed airplane. The other is to design a rotor having a minimum solidity, allowing in consequence a large rotor disc area in compar-ison with the actual blade area.
The latest Autogiro, the C.30P, has a rotor whose solidity is unnecessarily small for the top speed of the machine, since the tip speed to forward speed ratio at top speed is between 2.5 and 3, while previous experiments have illustrated the fact that it could be as low as 1.7 or so, with advantage from the efficiency point of view and without appreciable vibration being developed.
This means that if the C.30 were clean enough or had power enough to have a top speed of the order of 160 mph, its rotor should be satisfactory without modification, assum-ing the weight of the machine unchanged, its low-speed characteristics should be approxi-mately equivalent to the present.
The solidity of the C.30 rotor is approximately 0.047 and while extremely low it can-not be considered by any means as the lowest possible in practice. By building the blades in the metal type of construction which this Company, in conjunction with Messrs. G. and J. Weir, is developing at present, it is considered as perfectly feasible lowering solidity by some 20 percent if necessary. As the top speed depends on the loading per square foot of blade area while the slow-speed characteristics depend almost exclusively on the loading per square foot of disc area, it is easy to reach the conclusion that top speeds of the order of 200 mph could be obtained with rotors of solidities of some 0.038 and disc loadings of 2 to 2.1 lb/sq ft (9.7—10.2 kg/sq m) which is not more than the disc loading of some Autogiros which have proved very satisfactory on their slow speed characteristics. As the loading of C.30 is approximately 1.7 lb/sq ft (8.3 kg/sq m), it means that a loading of 2.1 lb/sq ft (10.2 kg/sq m) means an increase of only about 10 percent in the minimum horizontal speed, in the vertical speed of descent, and in the landing.
In order to increase somewhat the tip speed for a given blade loading it would be possi-ble to decrease either the chord of the blade toward the tip or the thickness of the section, or both. Decrease of the chord will probably not contribute anything toward increased effI-ciency at high speed, but decrease in the relative thickness of the section probably would, considering in particular the very high relative air speeds which will be attained by the tip of the blade which advances, and so it is proposed to give the blades of the high speed-range machines taper in thickness toward the tip.
In order to obtain the lowest possible figure for a parasite drag, it will be advisable to use air-cooled inline or H engines, to retract the undercarriage during flight into the fuse-lage, to use a single-strut pylon of minimum section inside of which will be contained the mechanical transmission for the rotor starter and all the rotor controls, to design rotor hub and articulations with a minimum of frontal area, and to build cantilever tails with perfect streamlined attachments to the fuselage.
In view of the preceding considerations, the following preliminary specifications for
two machines designated as C.31 and C.32 respectively are proposed.
C.31 Two-seat coupe machine.
One 385-hp sixteen-cylinder Napier Rapier IV. (Note—Gears must be altered to allow for maximum airscrew rpm of not less than 2,200).
Estimated empty weight 2,000 lb (907 kg), useful load 1,000 lb (454 kg), (one pilot,
one passenger, 7 Imp gal (32 1) oil, 60 Imp gal (273 1) petrol, leaving 120 lb (54 kg) for
disposal)
Parasite drag with undercarriage folded—estimated at equivalent of 75 lb (34 kg) at 100 mph (161 km/h) non-corrected for airscrew slipstream interference. Number of rotor blades—three; rotor diameter—42 ft (12.8 m); rotor rpm at top speed, at sea level =234; load/sq ft of disc area =2.15 lb (10.5 kg/sq m); peripheral rotor speed at sea level =515 ft/sec (157 m/s).
Estimated performance. Top speed at sea level 206 mph (332 km/h); minimum hori-zontal speed at sea level 22 mph (35 km/h); vertical speed of disc at about 10 mph (16 km/h) forward speed 15/17 ft/sec (4.6/5.2 m/s); landing when flattening out—about 10 percent faster than C.30; take-off run—about 20 percent longer than C.30; steep climb for slow forward speeds—about equivalent to C.30; rate of climb at about 100 mph (161 km/h) is 1,700 ft/mm (8.64 m/s); practical ceiling 25,000 ft (7,620 m).
If a variable-pitch airscrew is incorporated, take-off could be made after a run from 10
percent to 20 percent shorter than that of C.30, and the climb at slow forward speeds would
be about 75 percent better.
Maximum relative air speed at top speed, sea level, will attain about 0.75 speed of
sound. No appreciable compressibility effects are anticipated.
At ceiling peripheral speed will increase to 0.65 to 0.7 of speed of sound, but forward
speed will have diminished to about 200 ft/sec (136 mph or 219 km/h).
Compressibility effects should not be of any importance since speed of sound is not
reached, and it is only the extreme tip of the blades that will have a small thickness ratio that will be affected and that only for a very short time per revolution.
C.32 Two-seat coup&~ machine.
One 200-hp de Havilland Gipsy Six. Empty weight 1,300 lb (590 kg); useful load 600 lb
(272 kg). Rotor diameter 34 ft (10.36 m); rotor rpm top speed at sea level 270; load/sq ft
disc area 2.06 lb (10.06 kg/sq m); rotor solidity 0.047.
Estimated parasite drag with undercarriage folded equivalent to 55 lb (25 kg) at 100
mph (161 km/h) non-corrected for airscrew slipstream interference.
Estimated performance. Top speed at sea level 180 mph (290 km/h); minimum hori-zontal speed 20 mph (32 km/h); vertical speed of disc at 10 mph (16 km/h) forward speed 14/16 ft/sec (4.3/4.9 m/s); landing about 8 percent faster than C.30; take-off run about 10 percent longer than C.30’s; rate of climb at slow forward speed—same ~ C. 30; rate of climb at about 90 mph (145 km/h) 1,200 ft/mm (6.1 m/s); practical ceiling 16,000 ft (4,880 m).
By using a variable-pitch airscrew take-off and the steep climb at slow forward speeds