magilla
Gyro Project Owner
- Joined
- Dec 17, 2005
- Messages
- 546
- Location
- Little Rock, AR
- Aircraft
- UH-1H / UH-60A
- Total Flight Time
- 2000+ RW
Hey guys,
I'm going through my helo aerodynamics books, and I have a question as it pertains to gyros:
Do gyros experience blowback?
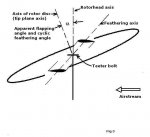
More specifically, since the tip path plane of the gyro is changed by cyclic input directly to the head, resulting in a non-rotating cyclic input being manifested in a non-rotating rotor head movement (double roller bearing) there is therefore no resultant "cyclic feathering" that is compensated for in a helicopter.
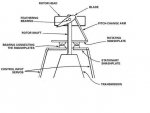
In a helo, non-rotating cyclic inputs are CONVERTED to a rotating input to the rotor system, and cyclic feathering is built in. This compensates for gyroscopic precession and blade flapping by automatically changing the pitch of each rotor blade through 360 degrees of rotation. Most pitch applied at 12 o'clock position, with gyroscopic precession acting on the retreating blade at 9 o'clock position (the downflap blade) and least pitch applied at 6 o'clock position, with gyroscopic precession acting on the advancing blade at 3 o'clock position (the upflap blade) with it sequentially going to no pitch input at the 3 and 6 o'clock positions.
As you accelerate a helicopter, the advancing blade has more lift through increased relative wind, which is compensated for by blade flapping and cyclic feathering. If you don't have a cyclic feathering mechanism, you experience "blowback," especially if you do not compensate for this dissymetry of lift by applying a hefty dose of right cyclic...
In other words, as you accelerate, the advancing blade side generates more lift, which causes the FRONT of the tip path plane to rise (gyroscopic precession 90 degrees in direction of rotation). To stop blowback, you MUST apply right cyclic with forward cyclic to compansate for dissymetry of lift. Even with cyclic feathering, in a UH-1 you still need to apply right cyclic as you accelerate.
Damn! I made this difficult, and didn't intend to.
Bottom line, when you all accelerate into forward flight, do you need to apply right cyclic while accelerating to prevent blowback in a gyro?
Or am I totally mistaken? As I think about this, since forward thrust is developed by the prop in a gyro, the rotor only generates lift... and the dissymetry of lift is compensated for by blade flapping alone. Is that correct?
Please help me understand this more....
I get the difference between helo rotors and gyro rotors - helo rotors are driven by the mast and forward thrust is generated by the rotor system alone. Gyro rotors only generate lift through relative wind, and forward thrust is provided for by the prop.
I do believe that if you had a partially driven rotor (goped or what have you) you would experience blowback to a lesser degree. How about if you pre-rotate prior to take off?
Gyro auronatical geniuses please speak up!!!
Also, does this phenomenon manifest itself in gyros:
Gyroscopic precession explains some fundamental effects occurring during various helicopter maneuvers. For example, the helicopter behaves differently when rolling into a right turn than when rolling into a left turn. During roll into a right turn, the aviator must correct for a nose-down tendency to maintain altitude. This correction is required because precession causes a nose-down tendency. During a roll into a left turn, precession causes a nose-up tendency. Aviator input required to maintain altitude is different during a left versus right turn as gyroscopic precession acts in opposite directions.
Could this explain some issues we have with making downwind turns?
I'm going through my helo aerodynamics books, and I have a question as it pertains to gyros:
Do gyros experience blowback?
More specifically, since the tip path plane of the gyro is changed by cyclic input directly to the head, resulting in a non-rotating cyclic input being manifested in a non-rotating rotor head movement (double roller bearing) there is therefore no resultant "cyclic feathering" that is compensated for in a helicopter.
In a helo, non-rotating cyclic inputs are CONVERTED to a rotating input to the rotor system, and cyclic feathering is built in. This compensates for gyroscopic precession and blade flapping by automatically changing the pitch of each rotor blade through 360 degrees of rotation. Most pitch applied at 12 o'clock position, with gyroscopic precession acting on the retreating blade at 9 o'clock position (the downflap blade) and least pitch applied at 6 o'clock position, with gyroscopic precession acting on the advancing blade at 3 o'clock position (the upflap blade) with it sequentially going to no pitch input at the 3 and 6 o'clock positions.
As you accelerate a helicopter, the advancing blade has more lift through increased relative wind, which is compensated for by blade flapping and cyclic feathering. If you don't have a cyclic feathering mechanism, you experience "blowback," especially if you do not compensate for this dissymetry of lift by applying a hefty dose of right cyclic...
In other words, as you accelerate, the advancing blade side generates more lift, which causes the FRONT of the tip path plane to rise (gyroscopic precession 90 degrees in direction of rotation). To stop blowback, you MUST apply right cyclic with forward cyclic to compansate for dissymetry of lift. Even with cyclic feathering, in a UH-1 you still need to apply right cyclic as you accelerate.
Damn! I made this difficult, and didn't intend to.
Bottom line, when you all accelerate into forward flight, do you need to apply right cyclic while accelerating to prevent blowback in a gyro?
Or am I totally mistaken? As I think about this, since forward thrust is developed by the prop in a gyro, the rotor only generates lift... and the dissymetry of lift is compensated for by blade flapping alone. Is that correct?
Please help me understand this more....
I get the difference between helo rotors and gyro rotors - helo rotors are driven by the mast and forward thrust is generated by the rotor system alone. Gyro rotors only generate lift through relative wind, and forward thrust is provided for by the prop.
I do believe that if you had a partially driven rotor (goped or what have you) you would experience blowback to a lesser degree. How about if you pre-rotate prior to take off?
Gyro auronatical geniuses please speak up!!!
Also, does this phenomenon manifest itself in gyros:
Gyroscopic precession explains some fundamental effects occurring during various helicopter maneuvers. For example, the helicopter behaves differently when rolling into a right turn than when rolling into a left turn. During roll into a right turn, the aviator must correct for a nose-down tendency to maintain altitude. This correction is required because precession causes a nose-down tendency. During a roll into a left turn, precession causes a nose-up tendency. Aviator input required to maintain altitude is different during a left versus right turn as gyroscopic precession acts in opposite directions.
Could this explain some issues we have with making downwind turns?
Attachments




Last edited: