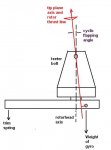
The required trim spring tension of a Bensen type rotorhead is primarily a function of cyclic flapping angle (rotor “blowback” angle). It has little to do with rotor lift/drag ratio.
As airspeed increases, the cyclic flapping angle normally increases, moving the rotor thrust vector nearer to the pitch pivot and reducing the amount of necessary trim spring tension.
Cambered rotorblades with insufficient trailing edge reflex suppress cyclic flapping and require more trim spring tension. The advancing blade, having greater airspeed than the retreating blade, twists nose down more than the retreating blade, reducing angle of attack and the amount of flapping required for lift equalization. Acts like a built in swashplate.
Rotorblades with a nose up pitching characteristic behave in the opposite manner. Bensen wood blades had excess reflex and the advancing blade twisted more nose up than the retreating blade, increasing cyclic flapping angle and moving the rotor thrust vector nearer to the pitch pivot. They would typically give a neutral stick without a trim spring at 50 mph.
Rotorblades are long and skinny and can’t be made so stiff that twist is not a factor if there is a residual pitching moment.
As airspeed increases, the cyclic flapping angle normally increases, moving the rotor thrust vector nearer to the pitch pivot and reducing the amount of necessary trim spring tension.
Cambered rotorblades with insufficient trailing edge reflex suppress cyclic flapping and require more trim spring tension. The advancing blade, having greater airspeed than the retreating blade, twists nose down more than the retreating blade, reducing angle of attack and the amount of flapping required for lift equalization. Acts like a built in swashplate.
Rotorblades with a nose up pitching characteristic behave in the opposite manner. Bensen wood blades had excess reflex and the advancing blade twisted more nose up than the retreating blade, increasing cyclic flapping angle and moving the rotor thrust vector nearer to the pitch pivot. They would typically give a neutral stick without a trim spring at 50 mph.
Rotorblades are long and skinny and can’t be made so stiff that twist is not a factor if there is a residual pitching moment.