The old accident reports from the Bensen era suggest that a common trigger of low-G crashes was simply levelling off after a turn.
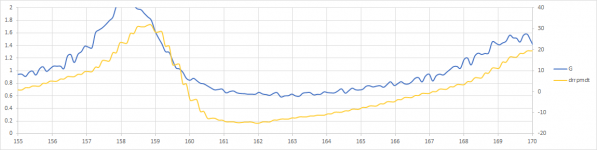
An inexperienced pilot likely makes a tight turn, rolls out and feels the "ballooning" that occurs from the higher RRPM that develops during the turn. He/she then pushes the stick forward, which starts a low-G sequence. Therefore, the first curve, which starts with over 1G of RRPM, simulates this chain of events. In a gyro with PPO tendencies, such an event can become self-energizing.
A number of the Bensen crashes took place when the gyro was partway around the pattern, and was just rolling out of a pattern turn.
Experienced gyro pilots normally ignore the high-RRPM ballooning coming out of a tight turn, since it's momentary. In "trick" flying, you can exaggerate the ballooning by pulling back on the stick, intentionally trading airspeed for additional climb -- again, momentarily.
IMHO, it would be ideal if the gyro's airframe were configured so that the frame nosed up when rotor thrust was reduced. This tendency can be induced by using either a slight low prop thrustline (LTL), a downloaded H-stab, or both.
In my own experiments, I found that a substantial H-stab with a few degrees of negative incidence, if immersed even partly in the propwash, produced the same effect as a low thrustline -- even if the prop thrustline actually was slight ABOVE the CG.
It would be interesting to rig a gyro in this way and use Mike G's equipment to see if a self-correcting configuration is possible (or if some gyros already are self-correcting out of low G). IMHO, a potentially deadly scenario that can be reached inadvertently during an absolutely routine maneuver is not ideal.
As discussed in the other thread that Mike mentions, slightly outboard flap hinges reduce the loss of control power that occurs at low G, at some cost in rotorhead complexity and weight.