skyguynca
Gold Member
- Joined
- Sep 23, 2004
- Messages
- 1,413
- Location
- Acampo, CA
- Aircraft
- depends on what I have sold recently
- Total Flight Time
- 5000+
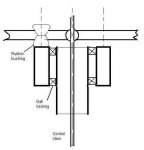
Some time ago we had discussed the different rotors you made for you gyro and helicopter. I remember you talking about using 3 biscuit engine mounts to attach the head to the hub, The main rotor mast was 4130 1 3/4 od x .1875 wall tubing. I remember the head was made from 4 plates 6061T6 .093 bonded together. I found the drawings you sent me on the setup. I also remember you telling me that it needed to be flown and tested with strain gauges. You had never gotten around to it and since you were not planning on flying it often, and you never flew higher than you'd be ok with falling, you just never got around to doing the strain gauges.
I think I some how lost some of the stuff but have some questions if you don't mind.
So why not use a solid plate of .375 6061T6? You had said the individual .093 plates were bonded together structurally, was there a advantage to bonding the plates together over a solid plate?
I found some of the pictures and description about the feathering axis setup, but I can not find the drawing for the feathering shaft, do you still have it?
I can not find the bearing part number for the main rotor shaft bearings, lost it with the feathering axis bearing number and feather housing and shaft drawings.
I have attached some of the pictures and drawings you had sent me, to help refresh your memory about the discussion.
I tried a old email I had for you but it gets returned. My current email is [email protected], I had two different emails previous to this one some time ago.
David M.
San Jose, ca
I think I some how lost some of the stuff but have some questions if you don't mind.
So why not use a solid plate of .375 6061T6? You had said the individual .093 plates were bonded together structurally, was there a advantage to bonding the plates together over a solid plate?
I found some of the pictures and description about the feathering axis setup, but I can not find the drawing for the feathering shaft, do you still have it?
I can not find the bearing part number for the main rotor shaft bearings, lost it with the feathering axis bearing number and feather housing and shaft drawings.
I have attached some of the pictures and drawings you had sent me, to help refresh your memory about the discussion.
I tried a old email I had for you but it gets returned. My current email is [email protected], I had two different emails previous to this one some time ago.
David M.
San Jose, ca